L’hypothèse de départ : le bassin constitue la « clé de voûte » de l’ensemble du système au cours de la croissance. Il jouerait un rôle important, au cours de l’apprentissage de la marche, à la fois dans la mise en place des courbures vertébrales (hypothèse 1) et dans la formation des axes mécaniques des membres inférieurs (hypothèse 2).
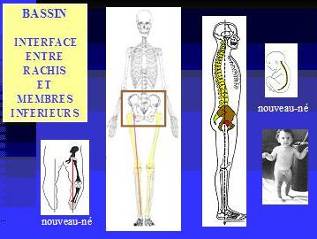
La première hypothèse a déjà été validée grâce à la mise en évidence d’un paramètre pelvien sagittal, l’«angle d’incidence sacrée» dont les variations commandent le degré des courbures rachidiennes. Le rôle de ce paramètre dans l’équilibre sagittal rachidien a permis de qualifier le bassin de véritable « vertèbre pelvienne ». La seconde hypothèse est en cours de validation. L’orientation 3D des cotyles joueraient un rôle important dans la formation des axes mécaniques des membres inférieurs.

Notre démarche procède d’un va-et-vient entre analyses in vivo indispensables à notre objectif et études in vitro. Pour pratiquer une analyse 3D rigoureuse de bassins secs, nous avons conçu un logiciel d’analyse mécanique et de visualisation graphique du bassin, DE-VISU, mis au point par l’ingénieur J. Hecquet. Il modélise le fonctionnement de chaque articulation pelvienne et utilise des paramètres fonctionnels que nous avons publiés antérieurement et dont nous avons testé in vivo la signification fonctionnelle.
Performances du logiciel DE-VISU
Variation de l’inclinaison des cotyles au sein d’un échantillon de 50 bassins adultes
Les analyses in vivo de la chaîne articulaire complète se font en collaboration avec les cliniciens à l’aide de la radiographie, du scanner, de l’IRM et depuis peu à l’aide du SYSTEME de radiographie 3D EOS. Issu des travaux de G. Charpak, ce système pilote permet, à partir de deux radiographies basse dose (face et profil), d’obtenir une géométrie 3D de pièces osseuses (colonne, bassin, fémur…), avec une précision proche de celle obtenue par reconstruction scanner.
L’adaptation à la bipédie, comme toute adaptation, est un compromis évolutif. Si elle comporte de nombreux points forts, elle présente aussi des revers de médailles. Nous montrons que les transformations de notre appareil musculo-squelettique vers la bipédie ont impliqué l’association étroite d’avantages acquis et de risques encourus. Aujourd’hui les pathologies causées par notre comportement bipède ne sont que les conséquences de ces transformations et la concrétisation de ces risques… des « cicatrices » laissées par l’évolution.
Nous avons mené une analyse évolutive de trois pathologies qui sont les points faibles les plus marquants de notre adaptation bipède :
1° LUXATIONS ROTULIENNES, engendrées par l’adduction des membres inférieurs.

2° PATHOLOGIES DE L’EQUILIBRE sagittal rachidien, liées au redressement du tronc.

3° INSTABILITES DU 1ER RAYON DU PIED ou « Hallux Valgus », engendrées par le passage d’une fonction préhensile à une fonction d’appui du pied.